Part 1: Computer Vision and Deep Learning
- Finding lane lines
- Workflow for lane detection pipeline:
- Load video -> Greyscale transform ->Gaussian smoothing -> Canny edge detection -> select the region of interest -> Hough transform -> Draw lines on original video
- Workflow for lane detection pipeline:
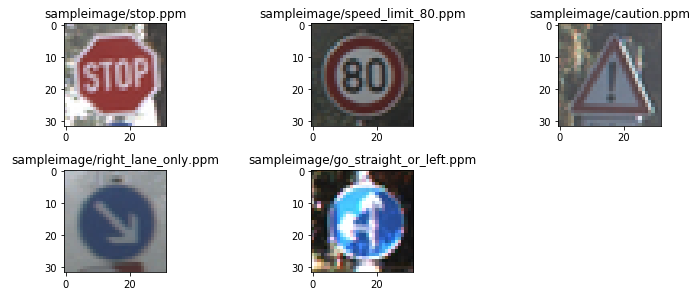
- Traffic sign classifier
- Datasets: German Traffic Sign Recognition Benchmark
- Three layers neural network including a fully connected layer
- Test accuracy: 0.935
- Advanced lane finding
- Workflow:
- Compute the camera calibration matrix and distortion coefficients given a set of chessboard images.
- Apply a distortion correction to raw images.
- Use color transforms, gradients, etc., to create a thresholded binary image.
- Apply a perspective transform to rectify binary image (“birds-eye view”).
- Detect lane pixels and fit to find the lane boundary.
- Determine the curvature of the lane and vehicle position with respect to center.
- Warp the detected lane boundaries back onto the original image.
- Output visual display of the lane boundaries and numerical estimation of lane curvature and vehicle position.
- Workflow:
- Vehicle detection and tracking
Part 2: Sensor fusion, Localization, and control
Extended Kalman filter
- Uncented Kalman Filter
- Kidnapped vehicle
- PID controller
- Model predictive control
Part 3: Path planning, concentrations, and system integration
- Path planning
- Semantic segmentation
- Functional safety
- Systemintegration